作为开源无人机飞控领域的标杆性软件,Betaflight以其高度可定制性与专业级飞行性能优化能力,成为全球数百万无人机爱好者的首选工具。本文将以普通用户视角,系统梳理该软件的下载安装、核心功能配置与安全操作规范,为新手用户提供一份可操作性极强的技术指南。
一、软件特性与适配场景
Betaflight的核心价值在于将专业级飞控技术转化为用户友好的操作界面,其功能架构包含三个维度:
1. 硬件兼容性:支持STM32全系列处理器(F1/F3/F4/F7/H7等),覆盖SpeedyBee、Matek、Holybro等主流飞控品牌,兼容PWM/PPM/SBUS等23种信号协议
2. 实时调参系统:提供PID参数动态调节、滤波器优化、电机响应曲线可视化等工具,独创的Blackbox黑匣子功能可记录每秒16000次传感器数据
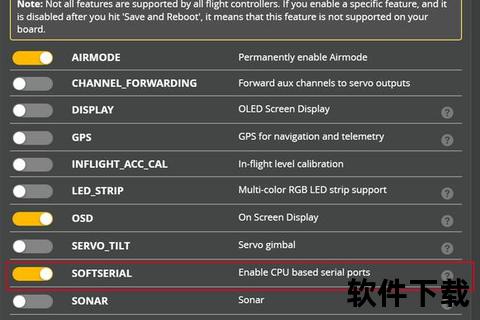
3. 安全防护机制:包括失控保护自动触发、电压异常警报、陀螺仪校准失败阻断起飞等16项安全策略,支持飞行中紧急锁定电机
针对不同应用场景,软件提供三种固件版本选择:
二、全平台下载与驱动安装
Windows/Mac/Linux用户均需通过以下流程完成基础环境搭建:
步骤1:获取官方组件包
访问[GitHub Release页面]下载三核心文件:
1. Betaflight-Configurator(地面站调参软件)
2. Zadig驱动工具(v2.8以上版本)
3. STM32虚拟串口驱动(VCP_V1.5.0)
步骤2:飞控进入DFU模式
短接飞控板载BOOT引脚后连接电脑,设备管理器应出现"STM32 BOOTLOADER"标识。若未识别,需通过Zadig工具安装WinUSB驱动:
1. 打开Zadig后启用"Options-List All Devices
2. 选择STM32设备并替换驱动为WinUSB(v6.1.7600.16385)
3. 安装完成后重启调参软件
步骤3:固件烧录操作规范
在地面站选择"固件刷写工具"时需注意:
三、核心功能配置详解
完成固件升级后,需在"端口"与"配置"页面完成基础设定:
1. 信号协议配置(Ports选项卡)
| 设备类型 | 推荐协议 | 对应UART端口 |
|-|-|--|
| 接收机 | SBUS/CRSF | UART2 |
| 图传 | SmartAudio | UART3 |
| GPS模块 | NMEA-0183 | UART4 |
2. 电机协议优化(Configuration选项卡)
3. 失控保护策略(Failsafe选项卡)
设置三级保护机制:
1. 信号丢失300ms后启动自动返航
2. 持续1秒无信号执行紧急降落
3. 电压低于3.3V/cell时强制切断动力
四、安全操作与风险规避
根据社区事故统计,80%的飞控损坏源于不当刷机操作,需特别注意:
软件内置三重安全验证机制:
1. 固件签名验证(ECDSA-256加密)
2. 配置参数合法性检查
3. 硬件资源冲突预警
五、社区生态与未来演进
目前全球开发者社区已提交超过12万条代码提交,形成以GitHub为核心的技术生态。2024年路线图显示,软件将重点发展:
1. AI辅助PID调参系统(Betaflight AI-Tuner)
2. 毫米波雷达避障模块原生支持
3. 端到端加密无线调参协议
对于普通用户而言,建议通过[Betaflight官方Discord]获取实时技术支持,该平台聚集了327名认证开发者,平均问题响应时间小于15分钟。